2023年8-10月,为响应国家战略,聚焦地方产业发展特点和需求,围绕助力乡村振兴,共同富裕示范区建设,助推政产学研用有机融合,推进科技成果转化,服务地方经济发展,充分发挥研究生在服务地方经济社会发展中的重要作用,宁波开展了宁波研究生学术节“千生走基层”行动。大连理工大学宁波研究院积极响应,智能制造与机器人创新团队组建调研团对宁波市污水处理行业进行调研,荣获二等奖。
智能制造与机器人创新团队由丛明教授带领,是我院一支面向智能制造与机器人领域的创新队伍。在团队建立不到一年时间内,智能制造与机器人创新团队获批两项宁波市重点研发计划暨“揭榜挂帅”项目,分别为智能潜入叉式移动机器人关键技术研发、污水处理智能清淤机器人研发及产业化应用。叉式移动机器人可以解决一系列的工业及特种环境难题,例如重型物料的搬运,可以基于多机器人协作的物流优化系统解决工业生产过程中物流量大、人工搬运劳动强度高、被动等待时间长、搬运效率低下等问题;污水处理智能清淤机器人主要针对人工清淤工作环境恶劣、清淤效率低、安全隐患大,以及目前清淤机器人可靠性差,清淤不彻底、残留多,适用场景有限,智能化低,现场还需人工操作,复杂环境适应性弱的情况,进行技术开发。围绕项目实施,在机器人路径规划、生产工艺优化、视觉检测、智能装配等方面正申请多项国家发明专利,其中已受理3项,申请软著8项,发表SCI检索论文2篇。
此外,智能制造与机器人创新团队在下述研发领域也有丰硕成果:
一、二维视觉检测技术
针对零部件制造企业对复杂零件高精度智能缺陷检测技术与装备的迫切需求,创新研究小样本高精度检测算法与增强模型,大构件复杂场景下小目标与多目标缺陷识别,提高复杂铸件多种类型缺陷检测的准确率和效率。
由团队自主研发搭建的视觉检测平台亮相宁波智博会、高交会。获得众多企业及研究平台关注,在后续建立交流合作的关系。


宁波高交会、智博会视觉检测平台展示
通过稳定高效的多机器人控制,建立多模多维数据深度交叉融合的缺陷判别体系,研究多模信息感知融合、机器人自主轨迹规划以及工艺参数学习与控制方法,实现非结构环境复杂多样任务下机器人的智能作业。可加快推进浙江省和宁波市数字赋能发展,提升行业的智能制造技术水平。项目成果可推广应用于新能源汽车、航空航天、兵器装备、光伏电子及轨道交通等制造行业,对制造业高质量发展起到积极促进作用,实现本地产业化应用。

多机器人工作平台
二、智能复合型灵巧作业机器人
由团队自主研发的具备室内空间下自主作业功能的综合性机器人,可通过视觉、触觉等多模态数据对周围环境进行自主感知,代替人类自主完成多元化任务。可在各作业区域内对待操作物体实现精准的物体分类识别及定位,引导机械臂按照特定工艺顺序完成作业。
适用于实验室、智能车间等室内环境,实现代替人工,解决人工效率低、精准度不高等问题。除此以外,智能复合型灵巧作业机器人还具备防爆能力,可以满足各类危险作业环境的应用需求。

复合移动机器人
三、三维视觉技术
通常单一视角的点云数据往往无法覆盖对象的全部表面,尤其是在复杂或遮挡较多的工件上,为解决这一问题,团队利用机器人搭载三维相机来采集工件在不同视角下的点云数据。通过多视图拼接,可以将来自不同角度的点云合并,形成对对象更完整和精确的三维表示。



工件三维构建图
针对结构空间复杂,外部干扰多源的工件,在保留关键尺寸特征的同时,实现了高精度的多视图拼接及三维重建。从而为质量控制、设计优化和后续工艺提供重要的信息和依据。并且也将高精度性的二维检测技术与三维视觉检测技术进行结合,同样实现了大型压铸件快速准确质量管控。

工件表面构建图
四、数字孪生
主要针对传统的压铸工艺中存在着生产过程中的质量波动、无法实现有效的质量预测与追溯、检测方法的低效和不精确等难题。将“5G +工业物联网”数据采集系统构建、多源数据驱动的压铸全流程数字孪生系统构建、模型与数据驱动的压铸过程质量预测与控制、动静态多目检测与云边协同视觉检测及复杂压铸件协同智能制造平台关键技进行结合,构建出压铸全流程数字孪生系统,相对应开发了数据驱动质量预测算法,实现产品压铸过程质量预测。

基于数字孪生的压铸过程可视化
同时集成机器视觉智能检测技术和数据管理系统,提高了铸件缺陷的检测效率与检出率,使压铸制造过程中存在的质量 问题原因具备可追溯性,提高了制造全流程的实时监控管理能力。
五、仿生偏振光导航传感器
卫星导航系统存在固有的脆弱性,极易受电磁、遮挡环境的影响。通过模仿昆虫开发仿生偏振导航传感器,实现不依赖卫星的智能导航,为各类无人平台提供广覆盖、强健可靠、便捷好用的定位导航服务,具有重要的意义。

多通道偏振光导航传感器及机器狗自主循迹
六、智能化CAD工业行业解决方案
传统CAD系统存在任务量重、效率低、设计成本高、难以快速准确设计产品等问题。智能化CAD工业行业解决方案具有参数化设计功能,适用于非标自动化设备制造企业,可以快速满足用户的个性化需求,并同时保持内部设计的一致性和外部产品的多样性。
该解决方案能够自动推导出一系列产品设计模型,并通过智能推理机制支持变型设计,能够快速生成产品的改进设计模型。该智能化CAD解决方案可用于船舶和海洋工程、机械工程和制造业、电子和电气工程和航航天工程等,用以设计机械零件、船舶结构、电子元件、装置和设备等,进行工程分析、模拟和优化,以提高生产制造效率。
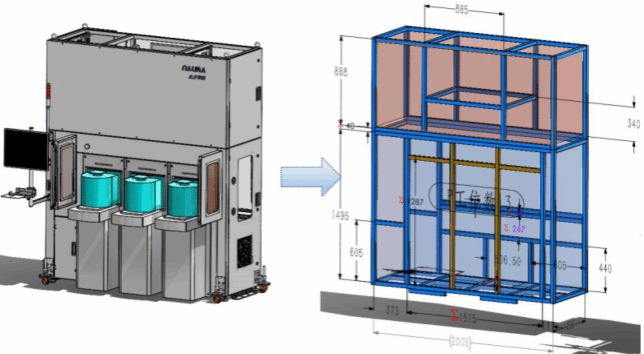
设备结构虚拟3D图
团队深入了解宁波的产业升级发展要求,同时配合研究院未来的发展规划,面向金属铸造、注塑、汽车、3C电子等产业,重点开展视觉高精度检测技术、机器人技术与装备、智能制造技术与应用、智能传感器等方向前沿技术研究,将沿着以下五个方向发展:1、零件内外部制造缺陷高精度视觉检测技术;2、多感知信息融合的机器人自主智能作业;3、复杂智能制造过程精确数字孪生系统构建与质量预测;4、仿生微纳智能导航及探测系统;5、智能CAD—支持快速设计的产品3D模型重用技术。最终将抓住行业痛点,完成成果转化。

