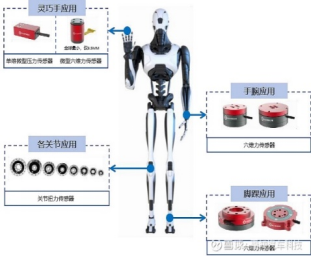
1. 应用领域与需求:
随着“具身智能”概念的提出,机器人的力反馈系统对多维力传感器的需求逐渐丰富。目前,市场主流六维力传感器的技术方案可以分为3类:电阻应变式,光电式和压电式。压电式传感器在设计原理上具有结构刚度强,高灵敏度和动态特性好的技术优势,但小型化力解耦结构与信号调理单元的技术难度较大,高端的六维力传感器被奇石乐公司垄断,且其系列产品的市场价格较高。

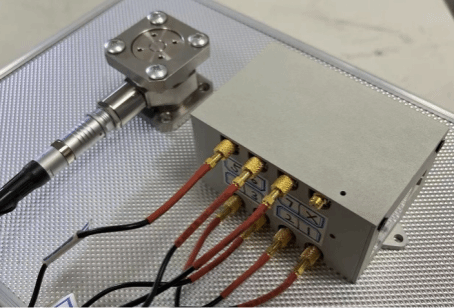
基于此,我们自主研发了适用于机器人的小型化压电式六维力传感器,该产品在保持与奇石乐竞品测量精度接近的基础上,无需额外的电荷信号解耦单元即可完成六维力测量,同时具有体积与成本优势。该压电六维力敏感单元的传力方式为包夹结构,通过在垂直Z轴方向施加预紧力,将外部作用的正向力和侧向力(力矩)转换为压电晶片之间的静压力和摩擦力,从而在压电晶组的不同电极区域产生电荷信号。该多路电荷信号可通过后端集成的电荷信号解耦装置,转换为机器人所需的六维力/力矩测量数据。
2. 核心产品与优势:
1. 适用于机器人的小型压电式六维力传感器样机,其具体性能参数如下:
量程:200N(10N.m);过载能力:±300%;线性度:±1.5% F.S.;相间串扰:±5.0% F.S.;迟滞误差:±0.2% F.S.;固有频率:8kHz;体积(重量):Φ55*35mm(0.27kg)。
其外部接口特性如下:数字通讯接口:RS422;数据频率:500Hz。

2. 压电六维力传感器加载标定实验台方案,其具体性能参数如下:
传感器加载尺寸:长/宽度可调:±75.0mm,高度可调:±100.0mm(含标定夹具);力测量范围:X/Y/Z轴->±2.0kN @ 0.1%F.S.,最多可支持3轴同步加载;装夹要求:基准装置单次装夹传感器,可完成全部测量方位面的加载标定。


相比于传统应变式力传感器,压电式六维力传感器的优势在于:
1. 动态小量程测量:在力加载过程中,压电传感器只有非常小的变形,这意味着具有极高的刚度。这使其具有很高的谐振频率,非常适合用于动态测试。在进行小量程力进行快速测试时,压电式六维力传感器具有优势,其本征谐振频率、响应速度和测量分辨率都较高。
2. 应对高初始负载:在力施加过程中,如果需要,压电传感器产生的电荷可以进行泄放,使电荷放大器输入状态显示为0。因此,电荷放大器的输入范围可以不受高初始负载影响,在超过量程的初始负载条件下,压电式六维力传感器仍可以进行增量力测量。
3. 产品应用场景:
根据压电式六维力传感器的技术特点,其潜在技术应用主要集中在如下场景:
1. 机器人系统动态力和力矩测试。
2. 风洞系统动态测力分析。
3. 机床切削加工过程中的接触力分析。
4. 弹簧和阻尼装置矢量力分析试验。